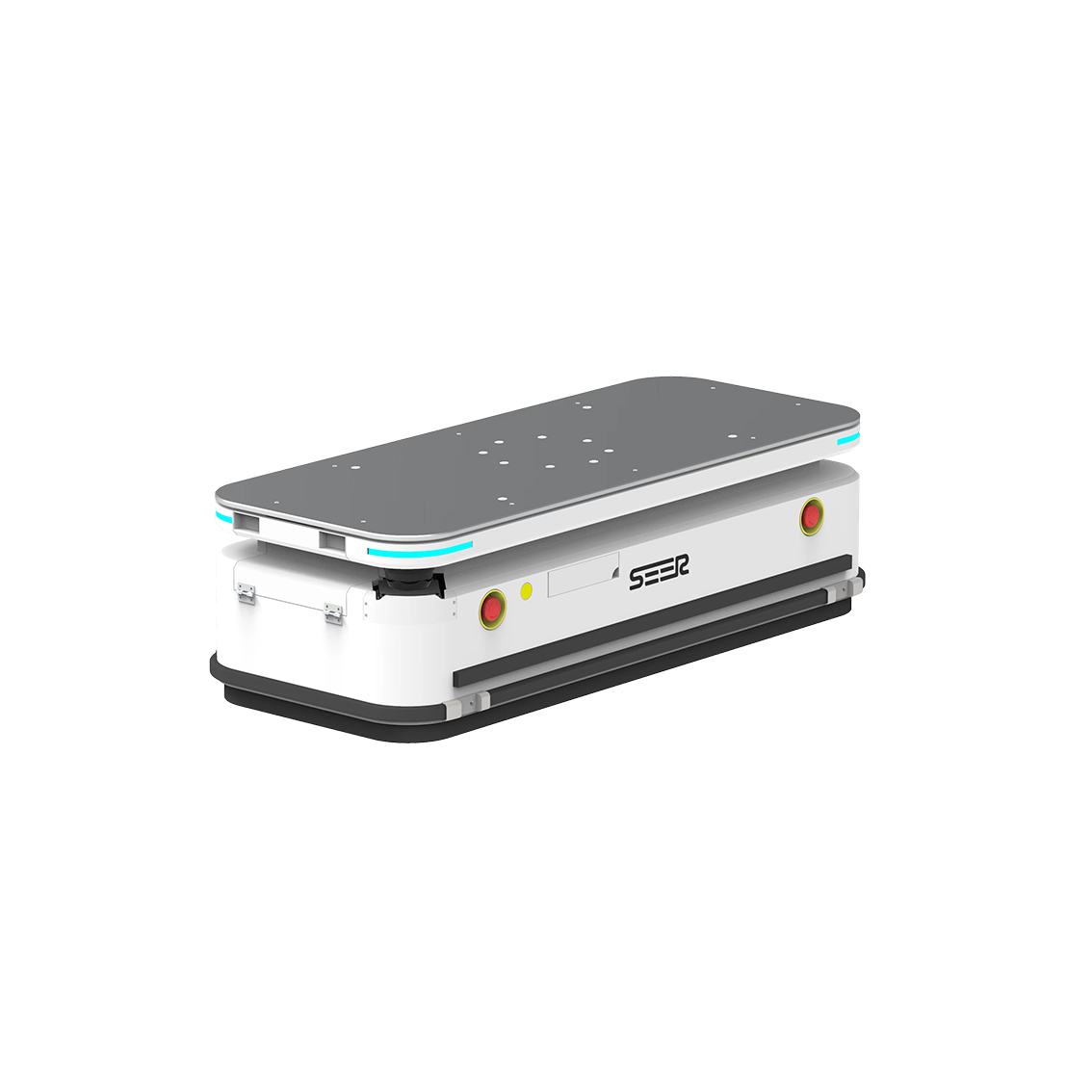
ROBOT NÂNG – Robot Nâng Đa Hướng SJV-W600DS-DL
Danh mục chính
Xe tự hành AGV AMR / Xe tự hành AGV AMR nâng hạ / Xe tự hành AGV / Robot di động tự hành AMR / Xe AGV AMR dùng cho xử lý vật liệu công nghiệp / Robot AGV nhà sản xuất Trung Quốc / Robot AMR nhà kho / Robot AMR nâng hạ bằng laser SLAM / Robot di động AGV AMR / Khung gầm AGV AMR điều hướng laser SLAM / Robot hậu cần thông minh
Ứng dụng

Khung gầm không người lái dòng AMB (Auto Mobile Base) dành cho xe tự hành AGV, một khung gầm đa năng được thiết kế cho xe tự hành AGV, cung cấp một số tính năng như chỉnh sửa bản đồ và định vị. Khung gầm không người lái này dành cho xe AGV cung cấp nhiều giao diện mở rộng như I/O và CAN để gắn các mô-đun phía trên khác nhau cùng với phần mềm máy khách mạnh mẽ và hệ thống điều phối giúp người dùng nhanh chóng hoàn thành việc sản xuất và ứng dụng xe tự hành AGV. Có bốn lỗ gắn trên đỉnh của khung gầm không người lái dòng AMB dành cho xe tự hành AGV, hỗ trợ mở rộng tùy ý với kích nâng, con lăn, tay máy, lực kéo tiềm ẩn, màn hình, v.v. để đạt được nhiều ứng dụng trên một khung gầm. AMB cùng với SEER Enterprise Enhanced Digitalization có thể thực hiện điều phối và triển khai thống nhất hàng trăm sản phẩm AMB cùng một lúc, giúp nâng cao đáng kể mức độ thông minh của hậu cần và vận chuyển nội bộ trong nhà máy.
Tính năng
• Tải trọng định mức: 600kg
• Thời lượng: 6,5 giờ
· Số lượng LiDAR: 2
• Đường kính quay: 1322mm
• Tốc độ di chuyển: ≤1,2 m/s
• Độ chính xác định vị: ±5, ±0.5mm
● Có nhiều tùy chọn điều hướng khác nhau
Công nghệ Laser SLAM và định vị bằng mã QR có thể được chuyển đổi linh hoạt và dễ dàng triển khai, đáp ứng yêu cầu của nhiều kịch bản và độ chính xác khác nhau.
● Chuyển động đa hướng linh hoạt hơn
Mô hình chuyển động đa hướng cho phép di chuyển không bị hạn chế và giảm thiểu các ràng buộc trong các tình huống khác nhau.
● Bảo vệ an ninh
Bảo vệ toàn diện nhờ công nghệ LIDAR + Safe Edge.
● Hiệu quả và thông minh
Hệ thống lập kế hoạch và quản lý kho hàng có thể được truy cập liền mạch để quản lý và tối ưu hóa hoạt động kinh doanh một cách chuyên sâu.
Thiết kế mỏng gọn với chiều rộng 546 mm, phù hợp với nhiều lối đi hẹp.
● Khả năng chịu tải cao và tuổi thọ pin dài
Khả năng chịu tải cao hỗ trợ trọng tải 600 kg và thời lượng pin 6,5 giờ.



Thông số kỹ thuật
| Tên sản phẩm | SJV-SW500 | SJV-W600DS-DL | SJV-W1000 | SJV-W1500 | |
| Nền tảngtham số | Phương pháp điều hướng | Laser SLAM | Laser SLAM | Laser SLAM | Laser SLAM |
| Chế độ lái | Vi sai hai bánh | Vô lăng kép đa hướng | Vi sai hai bánh | Vi sai hai bánh | |
| Màu vỏ sò | Màu xanh lam/ Màu tùy chỉnh | RAL9003 / Màu tùy chỉnh | Màu xanh lam / Màu tùy chỉnh | Màu xanh lam / Màu tùy chỉnh | |
| Dài*Rộng*Cao (mm) | 924*758*300 | 1276*546*365 | 1224*730*420 | 1210*892*280 | |
| Đường kính quay (mm) | 1035 | 1330 | 1350 | 1415 | |
| Trọng lượng (có pin) (kg) | 200 | 320 | 250 | 250 | |
| Tải trọng tối đa (kg) | 500 | 600 | 1000 | 1500 | |
| Kích thước bệ nâng (mm) | Ø600 | 1250*510 | 1200*700 | 1180*860 | |
| Chiều cao nâng tối đa (mm) | 60±1 | 60±1 | 60±1 | 60±1 | |
| Hiệu suất tham số | Chiều rộng tối thiểu có thể đi qua (mm) | 898 | 660 | 870 | 1000 |
| Độ chính xác vị trí định vị (mm)* | ±5 | ±5 | ±5 | ±5 | |
| Độ chính xác góc định vị (°)* | ±0,5 | ±0,5 | ±0,5 | ±1 | |
| Tốc độ di chuyển (m/s) | ≤1,67 | ≤1,2 | ≤1,67 | ≤1,67 | |
| Ắc quytham số | Thông số kỹ thuật pin (V/Ah) | 48/40 (Lithium Sắt Photphat) | 48/40 (Lithium Sắt Photphat) | 48/40 (Lithium Sắt Photphat) | 48/40 (Lithium Sắt Photphat) |
| Thời lượng pin tổng thể (giờ) | 10 | 8 | 6 | 6 | |
| Thông số sạc tự động (V/A) | 54,6/25 | 54,6/25 | 54,6/25 | 54,6/25 | |
| Thời gian sạc (10-80%) (giờ) | ≤1,5 | ≤1,5 | ≤1,5 | ≤2 | |
| Phương thức sạc | Thủ công/Tự động | Thủ công/Tự động/Công tắc | Thủ công/Tự động | Thủ công/Tự động | |
| Cấu hình | Số Lidar | 1(SICK nanoScan3/P+F R2000-HD) | 2 (SICK nanoScan3) | 2 (SICK nanoScan3 / P+FR2000-HD + OLEILR-1BS2) | 1(SICK nanoScan3 / P+F R2000-HD) |
| Số lượng cảm biến quang điện tránh chướng ngại vật ở vị trí thấp | - | - | - | - | |
| Phát hiện hàng hóa | - | - | - | - | |
| Nút dừng khẩn cấp | ● | ● | ● | ● | |
| Người phát ngôn | ● | ● | ● | ● | |
| Ánh sáng khí quyển | ● | ● | ● | ● | |
| Dải cản xe | ● | ● | ● | ● | |
| Chức năng | Chuyển vùng Wi-Fi | ● | ● | ● | ● |
| Sạc tự động | ● | ● | ● | ● | |
| Nhận diện kệ | ● | ● | ● | ● | |
| Quay | ● | - | - | ● | |
| Vị trí chính xác bằng mã QR | 〇 | 〇 | 〇 | 〇 | |
| Điều hướng bằng mã QR | 〇 | 〇 | 〇 | 〇 | |
| Điều hướng bằng gương phản xạ laser | 〇 | 〇 | 〇 | 〇 | |
| Chứng nhận | EMC/ESD | ● | ● | ● | - |
| UN38.3 | ● | ● | ● | 〇 | |
* Độ chính xác điều hướng thường đề cập đến độ chính xác lặp lại mà robot điều hướng đến vị trí cần đến.
● Tiêu chuẩn 〇 Tùy chọn Không có
Doanh nghiệp của chúng tôi







