Robot tay máy cộng tác Szgh-Arm 2442co Robot tay máy cộng tác dùng để xếp dỡ hàng hóa



Robot tay máy cộng tác Szgh-Arm 2442co Robot tay máy cộng tác dùng để xếp dỡ hàng hóa
Danh mục chính
Cánh tay robot công nghiệp / Cánh tay robot cộng tác / Kẹp điện / Bộ truyền động thông minh / Giải pháp tự động hóa
Ứng dụng
Robot cộng tác SCIC Z-Arm là loại robot cộng tác 4 trục trọng lượng nhẹ với động cơ truyền động tích hợp bên trong, không còn cần bộ giảm tốc như các loại SCARA truyền thống khác, giúp giảm chi phí đến 40%. Robot cộng tác SCIC Z-Arm có thể thực hiện nhiều chức năng, bao gồm nhưng không giới hạn ở in 3D, xử lý vật liệu, hàn và khắc laser. Nó có khả năng nâng cao đáng kể hiệu quả và tính linh hoạt trong công việc và sản xuất của bạn.
Đặc trưng

Độ chính xác cao
Khả năng lặp lại
±0,02mm
Tải trọng lớn
5kg
Sải tay dài
Trục JI 220mm
Trục J2 200mm
Giá cả cạnh tranh
Chất lượng cấp công nghiệp
Cgiá cả cạnh tranh
Sản phẩm liên quan



Thông số kỹ thuật
Robot cộng tác SCIC Z-Arm 2442B được thiết kế bởi SCIC Tech, là một robot có trọng lượng nhẹ, dễ lập trình và sử dụng, hỗ trợ SDK. Ngoài ra, nó còn hỗ trợ phát hiện va chạm, nghĩa là sẽ tự động dừng lại khi chạm vào người, tạo nên sự hợp tác thông minh giữa người và máy, với độ an toàn cao.
| Cánh tay robot cộng tác Z-Arm 2442B | Thông số |
| Chiều dài cánh tay trục 1 | 220mm |
| Góc quay trục 1 | ±90° |
| chiều dài cánh tay trục 2 | 200mm |
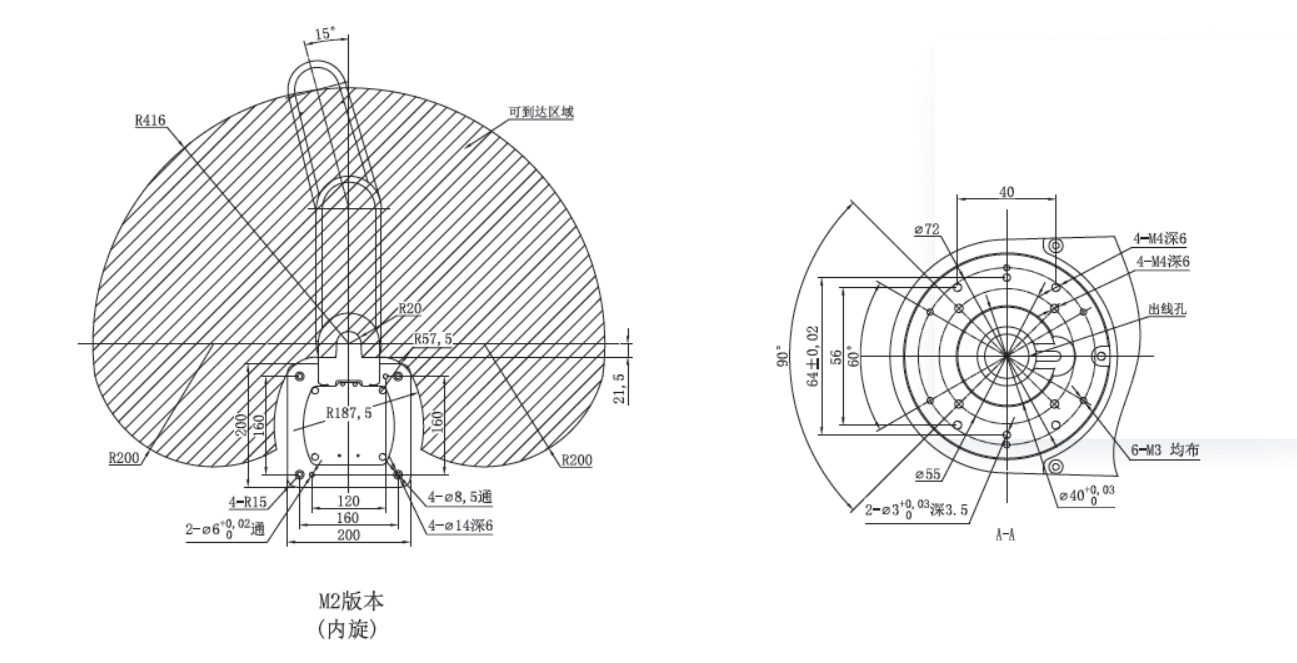
| Góc quay 2 trục | ±164° (Tùy chọn: 15-345 độ) |
| Hành trình trục Z | 240 (Chiều cao có thể tùy chỉnh) |
| phạm vi xoay trục R | ±1080° |
| Tốc độ tuyến tính | 1600mm/s (tải trọng 4kg) |
| Khả năng lặp lại | ±0,02mm |
| Tải trọng tiêu chuẩn | 4kg |
| Tải trọng tối đa | 5kg |
| Bậc tự do | 4 |
| Nguồn điện | Điện áp 220V/110V 50-60HZ, tương thích với điện áp 48VDC, công suất đỉnh 200W. |
| Giao tiếp | Ethernet |
| Khả năng mở rộng | Bộ điều khiển chuyển động tích hợp sẵn cung cấp 24 cổng I/O cộng với khả năng mở rộng dưới cánh tay robot. |
| Chiều cao của trục Z có thể được tùy chỉnh. | 0,1m-0,5m |
| Dạy kéo theo trục Z | / |
| Giao diện điện được dành riêng | Cấu hình tiêu chuẩn: Dây dẫn 24*23awg (không bọc chống nhiễu) từ bảng ổ cắm xuyên qua nắp tay đòn phía dưới. Tùy chọn: 2 ống chân không φ4 xuyên qua bảng ổ cắm và mặt bích. |
| Tương thích với kẹp điện HITBOT | E-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100 |
| Ánh sáng thở | / |
| Phạm vi chuyển động của cánh tay thứ hai | Tiêu chuẩn: ±164° Tùy chọn: 15-345 độ |
| Phụ kiện tùy chọn | / |
| Sử dụng môi trường | Nhiệt độ môi trường: 0-45°C Độ ẩm: 20-80%RH85 (không đóng băng) |
| Đầu vào/đầu ra kỹ thuật số (cách ly) | 9+3+duỗi cẳng tay (tùy chọn) |
| Đầu ra kỹ thuật số cổng I/O (cách ly) | 9+3+duỗi cẳng tay (tùy chọn) |
| Đầu vào tương tự của cổng I/O (4-20mA) | / |
| Ngõ ra tương tự của cổng I/O (4-20mA) | / |
| Chiều cao cánh tay robot | 683mm |
| Trọng lượng cánh tay robot | Hành trình piston 240mm, trọng lượng tịnh 27kg. |
| Kích thước cơ bản | 250mm*250mm*15mm |
| Khoảng cách giữa các lỗ cố định đế | Kích thước 200mm*200mm, kèm bốn ốc vít M8*20. |
| Phát hiện va chạm | √ |
| Dạy Drag | √ |
Phiên bản Motion Range M1 (Xoay ra ngoài)
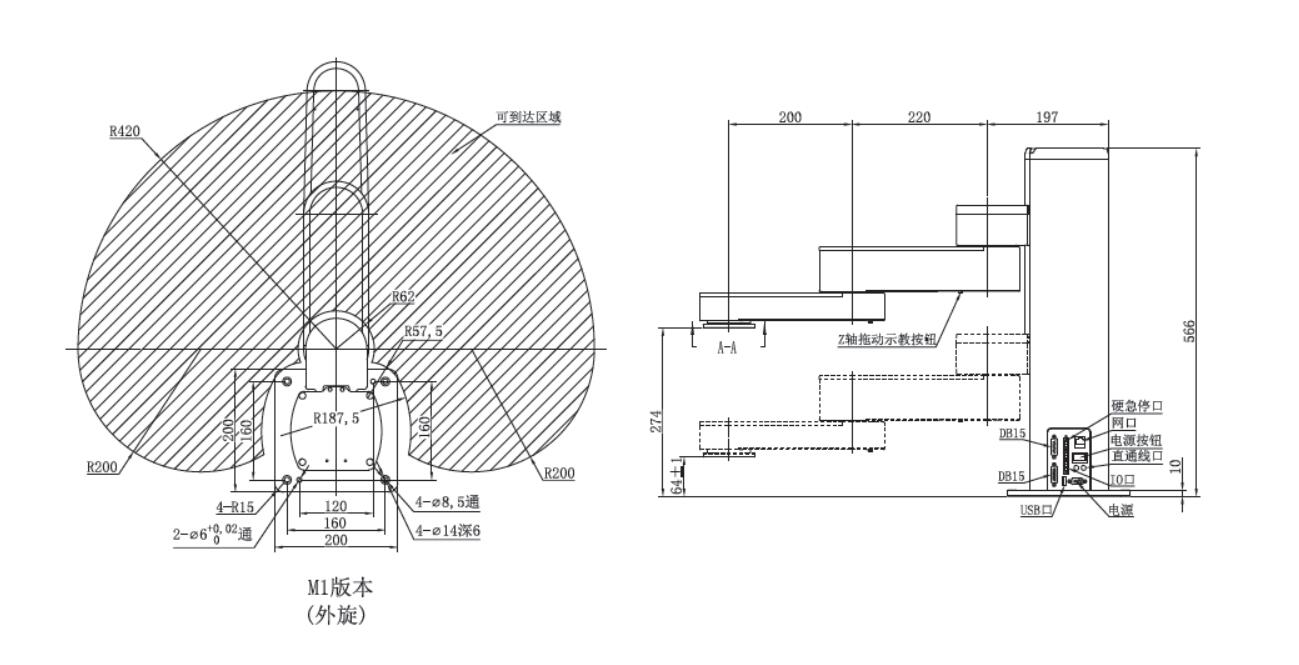
Giới thiệu giao diện

Giao diện cánh tay robot Z-Arm 2442 được lắp đặt ở 2 vị trí, bên hông đế cánh tay robot (được định nghĩa là A) và phía sau đầu cánh tay. Bảng giao diện tại A có giao diện công tắc nguồn (JI), giao diện nguồn 24V DB2 (J2), đầu ra cổng I/O người dùng DB15 (J3), cổng I/O đầu vào người dùng DB15 (J4) và các nút cấu hình địa chỉ IP (K5). Cổng Ethernet (J6), cổng vào/ra hệ thống (J7), và hai ổ cắm dây thẳng 4 lõi J8A và J9A.
Các biện pháp phòng ngừa
1. Quán tính tải trọng
Hình 1 thể hiện trọng tâm của tải trọng và tầm hoạt động của tải trọng khuyến nghị cùng với quán tính chuyển động theo trục Z.

Hình 1 Mô tả tải trọng dòng XX32
2. Lực va chạm
Lực kích hoạt của cơ chế bảo vệ chống va chạm khớp ngang: lực của dòng XX42 là 40N.
3. Lực tác dụng bên ngoài theo trục Z
Lực tác dụng bên ngoài lên trục Z không được vượt quá 120N.

Hình 2
4. Lưu ý khi lắp đặt trục Z tùy chỉnh, xem Hình 3 để biết chi tiết.

Hình 3
Lưu ý cảnh báo:
(1) Đối với trục Z tùy chỉnh có hành trình lớn, độ cứng của trục Z giảm khi hành trình tăng. Khi hành trình của trục Z vượt quá giá trị khuyến nghị, người dùng có yêu cầu về độ cứng và tốc độ >50% tốc độ tối đa, rất nên lắp đặt giá đỡ phía sau trục Z để đảm bảo độ cứng của cánh tay robot đáp ứng yêu cầu ở tốc độ cao.
Các giá trị khuyến nghị như sau: Hành trình trục Z của dòng Z-ArmXX42 >600mm
(2) Sau khi hành trình trục Z tăng lên, độ thẳng đứng của trục Z và đế sẽ giảm đáng kể. Nếu không áp dụng các yêu cầu nghiêm ngặt về độ thẳng đứng cho trục Z và tham chiếu đế, vui lòng tham khảo ý kiến nhân viên kỹ thuật riêng.
5. Nghiêm cấm cắm nóng dây nguồn. Cảnh báo đảo cực khi cực dương và cực âm của nguồn điện bị ngắt kết nối.
6. Không ấn cần ngang xuống khi nguồn điện đã tắt.

Hình 4
Khuyến nghị về đầu nối DB15

Hình 5
Mẫu đề xuất: Đầu cắm đực mạ vàng vỏ ABS YL-SCD-15M, Đầu cắm cái mạ vàng vỏ ABS YL-SCD-15F
Mô tả kích thước: 55mm*43mm*16mm
(Tham khảo Hình 5)
Bàn kẹp tương thích với cánh tay robot
| Số hiệu mẫu cánh tay robot. | Kẹp tương thích |
| XX42 T1 | Z-EFG-8S NK/Z-EFG-12 NK/Z-EFG-20 NM NMA/Z-EFG-20S/ Z-EFG-30NM NMA Máy in 3D trục thứ 5 |
| XX42 T2 | Z-EFG-50 ALL/Z-EFG-100 TXA |
Sơ đồ kích thước lắp đặt bộ chuyển đổi nguồn
Bộ nguồn XX42 cấu hình 24V 500W RSP-500-SPEC-CN

Sơ đồ môi trường sử dụng bên ngoài của cánh tay robot

Doanh nghiệp của chúng tôi


Danh mục sản phẩm
-

Cánh tay robot 6 trục tiết kiệm chi phí với Megmeet Ehave ...
-

Hệ thống kẹp đa trạm 6 trục Scara Rob...
-
Robot hàn 6 trục giá tốt nhất...
-

Cánh tay robot CNC 6 trục thông minh / Cánh tay robot cơ khí...
-

Thiết bị hàn robot tự động, máy hàn công nghiệp...
-
Cánh tay robot cơ khí 6 trục bằng kim loại bán chạy nhất...