Bộ kẹp robot cộng tác – Bộ kẹp mềm bên trong ISC cho cánh tay robot cộng tác



Danh mục chính
Cánh tay robot công nghiệp / Cánh tay robot cộng tác / Kẹp điện / Bộ truyền động thông minh / Giải pháp tự động hóa / Kẹp cánh tay robot cộng tác / Kẹp mềm / Kẹp cánh tay robot
Ứng dụng

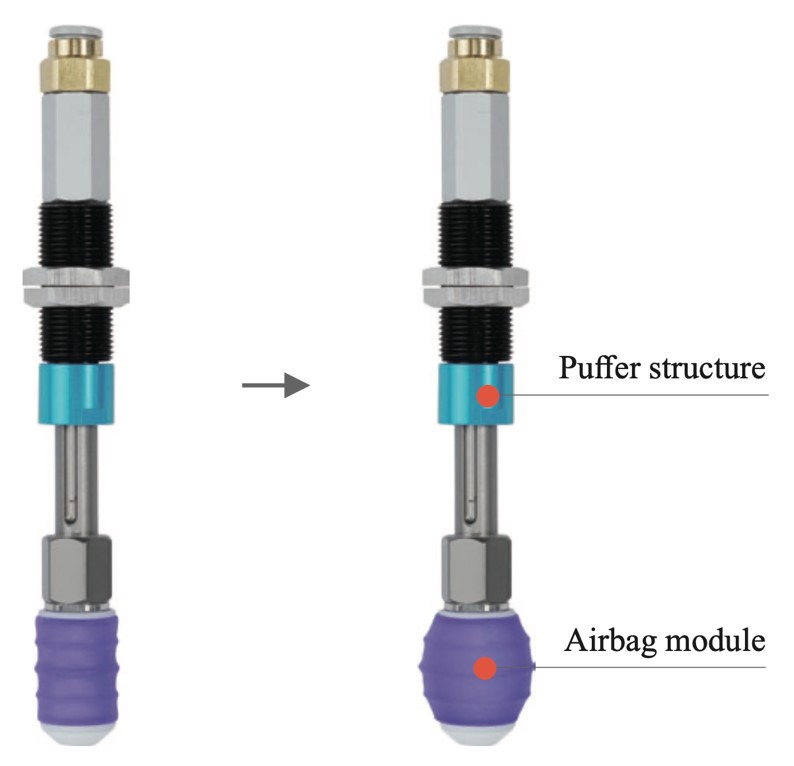
Kẹp hỗ trợ bên trong ISC là một loại kẹp mềm cải tiến, có thiết kế mô phỏng hình thái tự vệ của cá nóc. Bằng cách bơm không khí dưới áp suất, kẹp có thể giãn nở và hoàn thành việc kẹp giữ hỗ trợ bên trong.
Do phần tiếp xúc với phôi được làm bằng cao su silicon mềm, sau khi tạo áp lực, sẽ có một lớp "đệm khí" giữa phần đỡ cứng và bề mặt tiếp xúc, giúp phân bố ứng suất đồng đều và giảm khả năng làm hỏng phôi. Ngoài ra, áp suất khí đầu vào có thể được điều chỉnh để kiểm soát độ giãn nở của túi khí và ứng suất tiếp xúc với phôi, từ đó tăng đáng kể độ mềm mại của hệ thống kẹp.
Tính năng

• Phương tiện truyền thông lái xe: không khí trong lành
• Tuổi thọ làm việc tiêu chuẩn: >100.000 lần
• Tần số hoạt động tối đa (cpm): 300
● Kẹp đỡ bên trong có cấu trúc túi khí đặc biệt và có thể tạo ra các biến dạng khác nhau tùy thuộc vào áp suất bên trong.
● Áp suất dương đầu vào: Bộ gá mở rộng, tự điều chỉnh để hỗ trợ bề mặt bên trong của vật thể và hoàn tất quá trình kẹp giữ.
● Áp suất âm đầu vào: Thiết bị tạo ra trạng thái tự nhiên và giải phóng các vật thể.
Bộ kẹp mềm SFG đã được triển khai trên các cánh tay robot cộng tác hàng đầu thế giới, bao gồm:

Robot ngang 4 trục (SCARA) Delta
Cánh tay robot công nghiệp Nachi Fujikoshi
Robot song song 4 trục (Delta) ABB
Robot cộng tác 6 trục UR
Robot cộng tác 6 trục AUBO



Thông số kỹ thuật
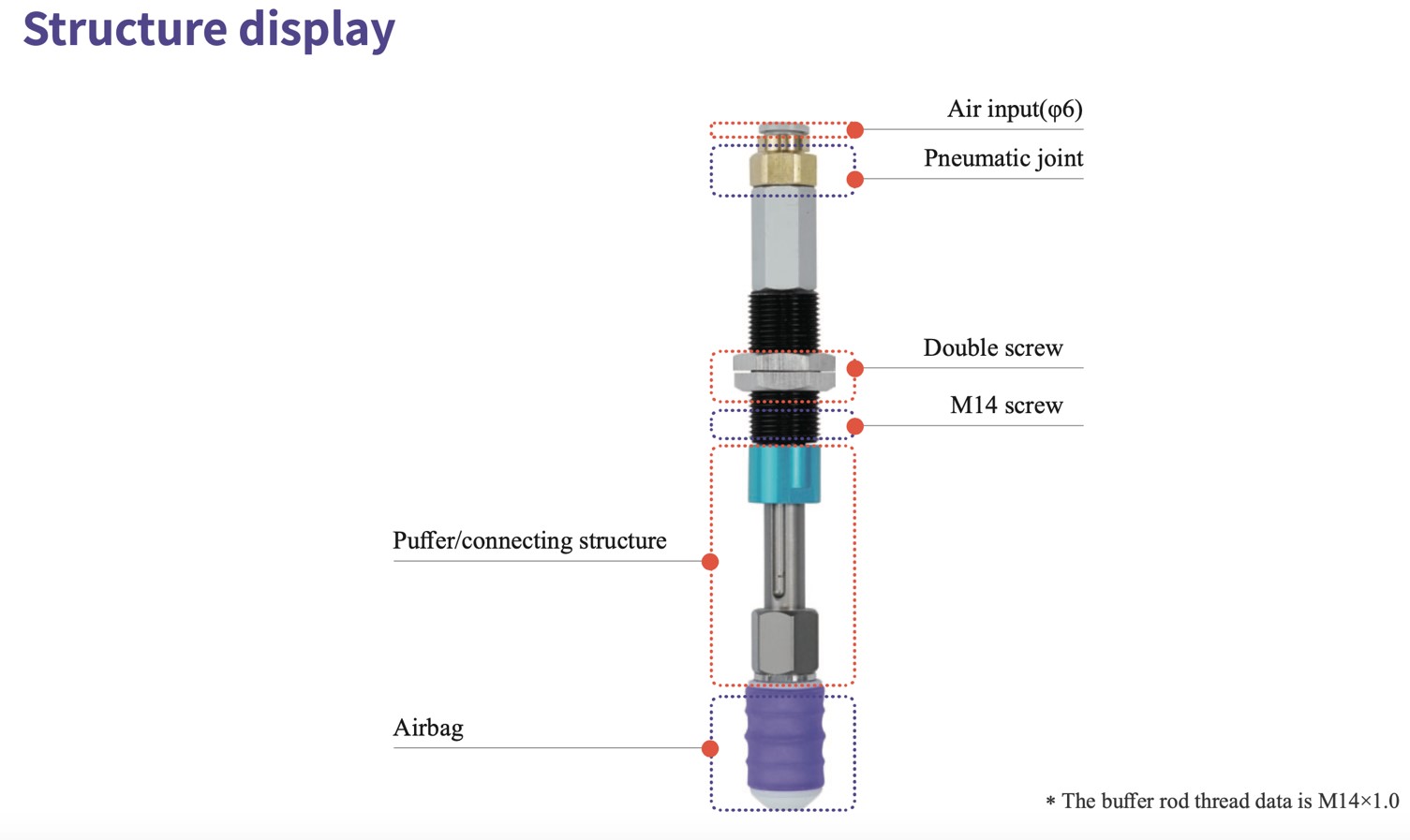
Kẹp đỡ bên trong bằng túi khí ISC là một loại kẹp mềm cải tiến, có thiết kế mô phỏng hình thái tự vệ của cá nóc. Bằng cách bơm khí nén, kẹp có thể giãn nở và hoàn thành việc kẹp đỡ bên trong. Vì áp suất khí đầu vào có thể được kiểm soát chính xác, lực kẹp tác dụng lên phôi có thể được kiểm soát, giúp giảm thiểu hư hại cho phôi.
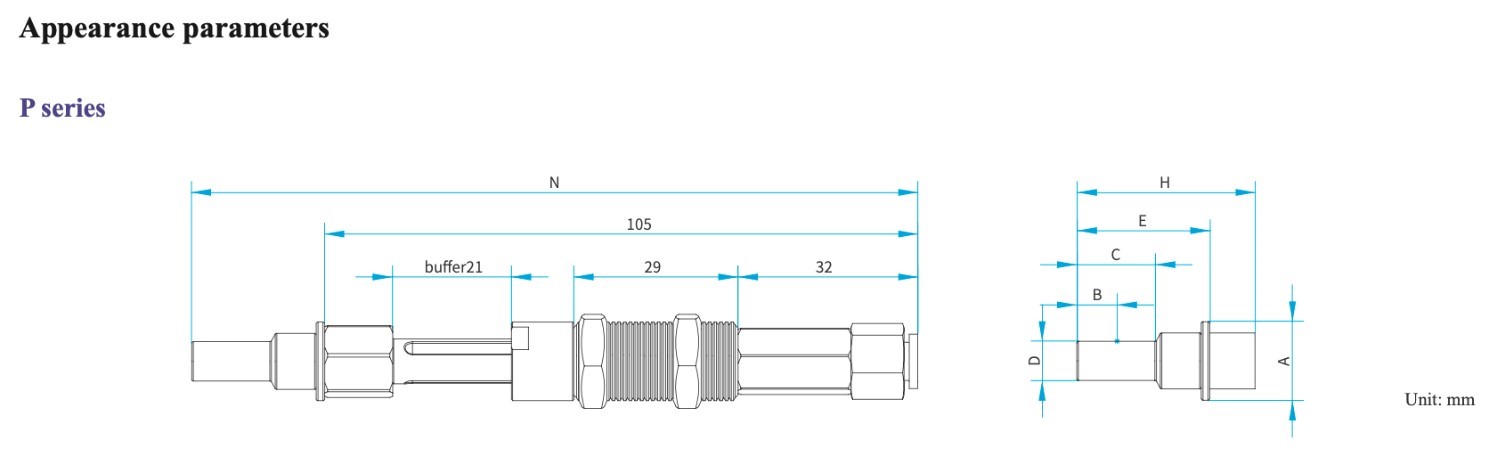
| Người mẫu | Tổng chiều cao của mô-đun túi khí H | Đường kính bề mặt tiếp xúc D | Đường kính của bộ phận kết cấu A | Chiều cao từ đường kính làm việc đến đáy B | Chiều cao của bề mặt tiếp xúc hiệu quả C | Chiều cao hoạt động của túi khí mô-đun E | Tổng chiều dài N |
| ISC-P4.5E | 25,5 | 4,5 | 14 | 4 | 8 | 17,5 | E+105 |
| ISC-P5E | 27,5 | 5 | 14 | 5 | 10 | 19,5 | E+105 |
| ISC-P6E | 30,5 | 6 | 14 | 6 | 12 | 22,5 | E+105 |
| ISC-P7E | 31,5 | 7 | 14 | 7 | 14 | 23,5 | E+105 |
| ISC-P8E | 31,5 | 8 | 14 | 7 | 14 | 23,5 | E+105 |
| ISC-P9E | 32,5 | 9 | 14 | 7.5 | 15 | 24,5 | E+105 |
| ISC-P10E | 32,5 | 10 | 14 | 7.5 | 15 | 24,5 | E+105 |
| ISC-P11E | 34,5 | 11 | 14 | 7.5 | 15 | 26,5 | E+105 |
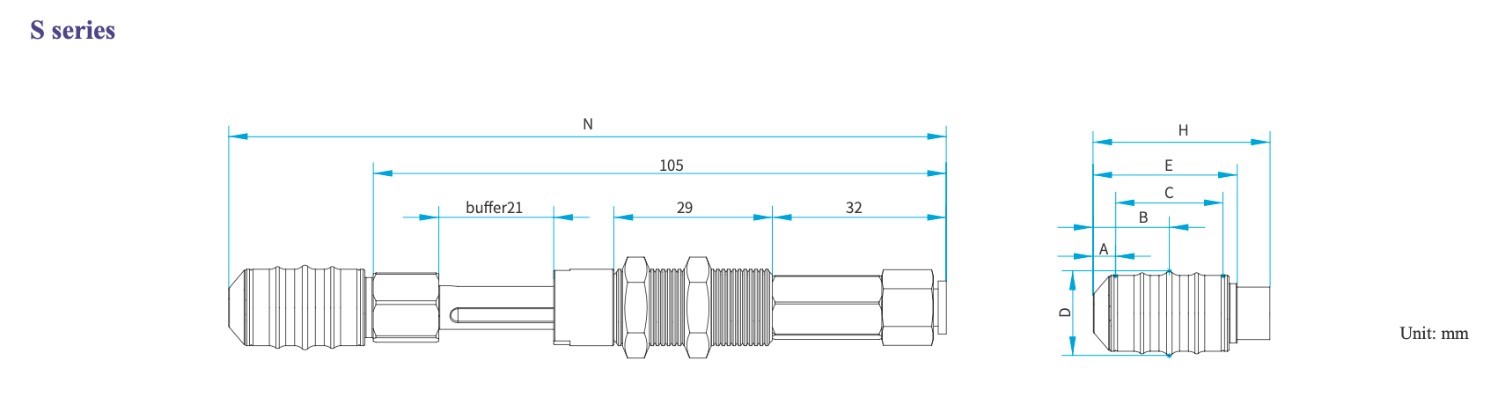
| Người mẫu | Tổng chiều cao của mô-đun túi khí H | Đường kính bề mặt tiếp xúc D | chiều cao hướng dẫn A | Chiều cao từ đường kính làm việc đến đáy B | Chiều cao của bề mặt tiếp xúc hiệu quả C | Chiều cao hoạt động của túi khí mô-đun E | Tổng chiều dài N |
| ISC-S14E | 32,5 | 14 | 4 | 14 | 20 | 26,5 | E+105 |
| ISC-S15.5E | 32,5 | 15,5 | 4 | 14 | 20 | 26,5 | E+105 |
| ISC-S18E | 40,5 | 18 | 6 | 19 | 26 | 34,5 | E+105 |
| ISC-S20.5E | 40,5 | 20,5 | 6 | 19 | 26 | 34,5 | E+105 |
| ISC-S23E | 40,5 | 23 | 6 | 19 | 26 | 34,5 | E+105 |
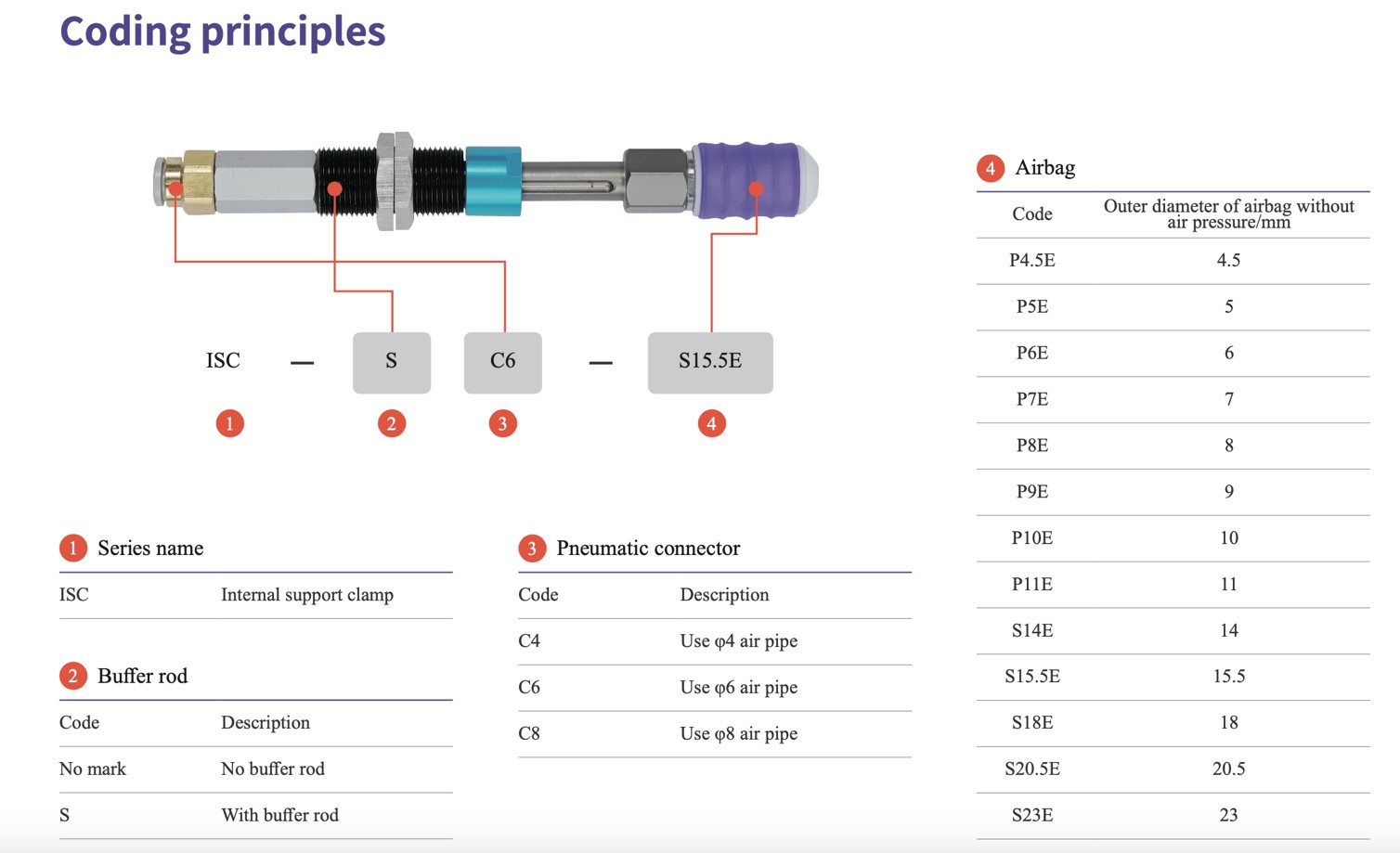
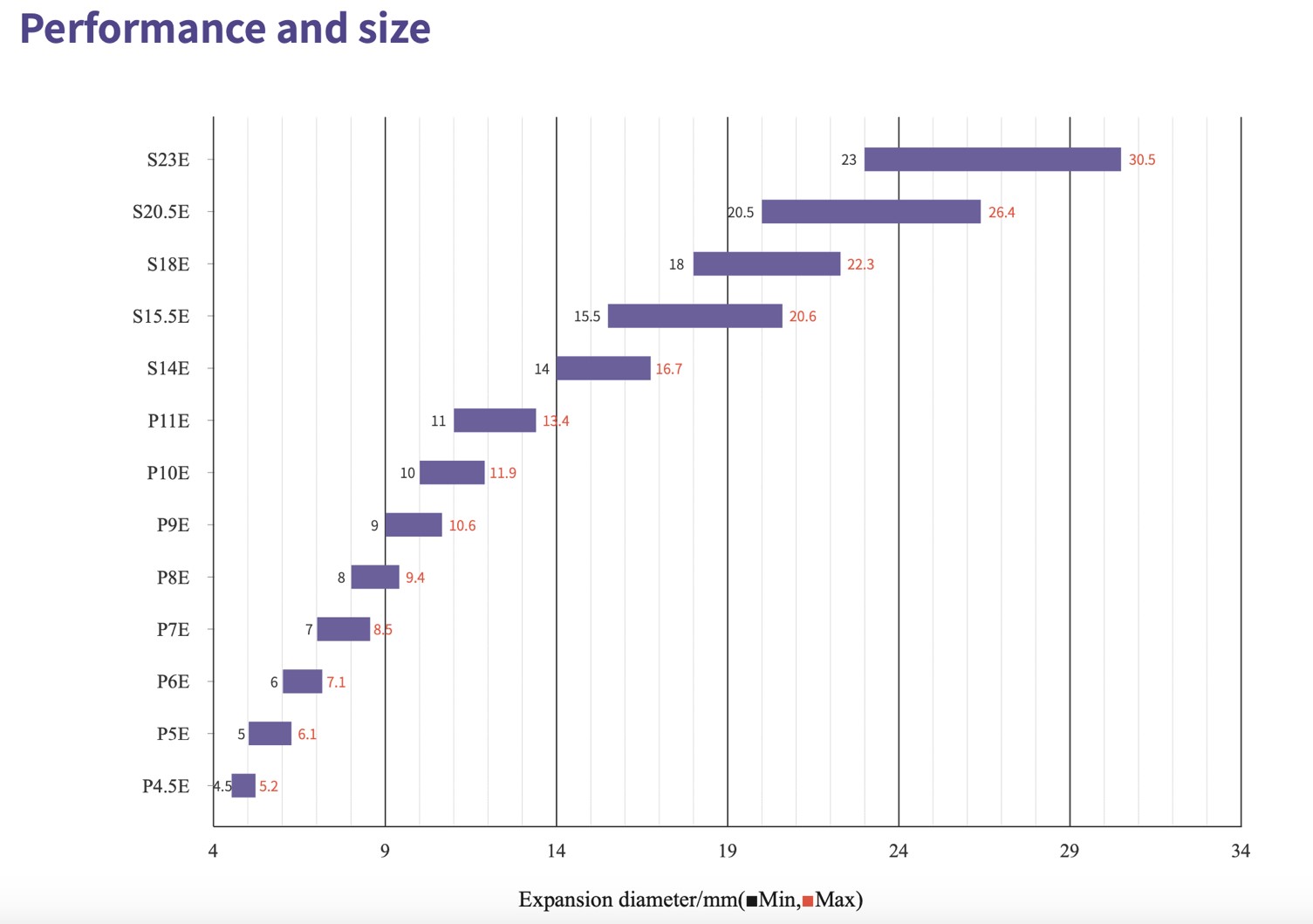
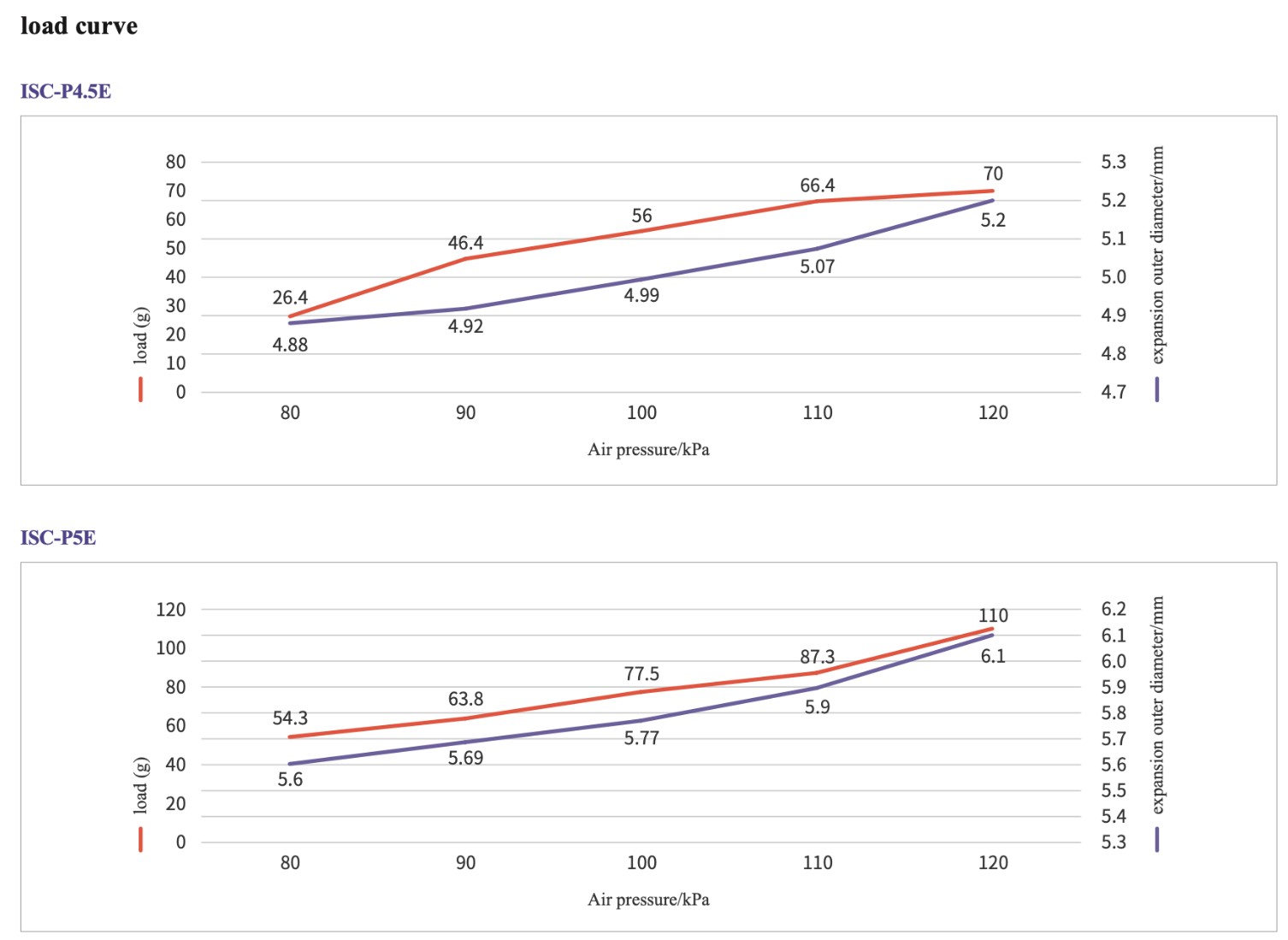
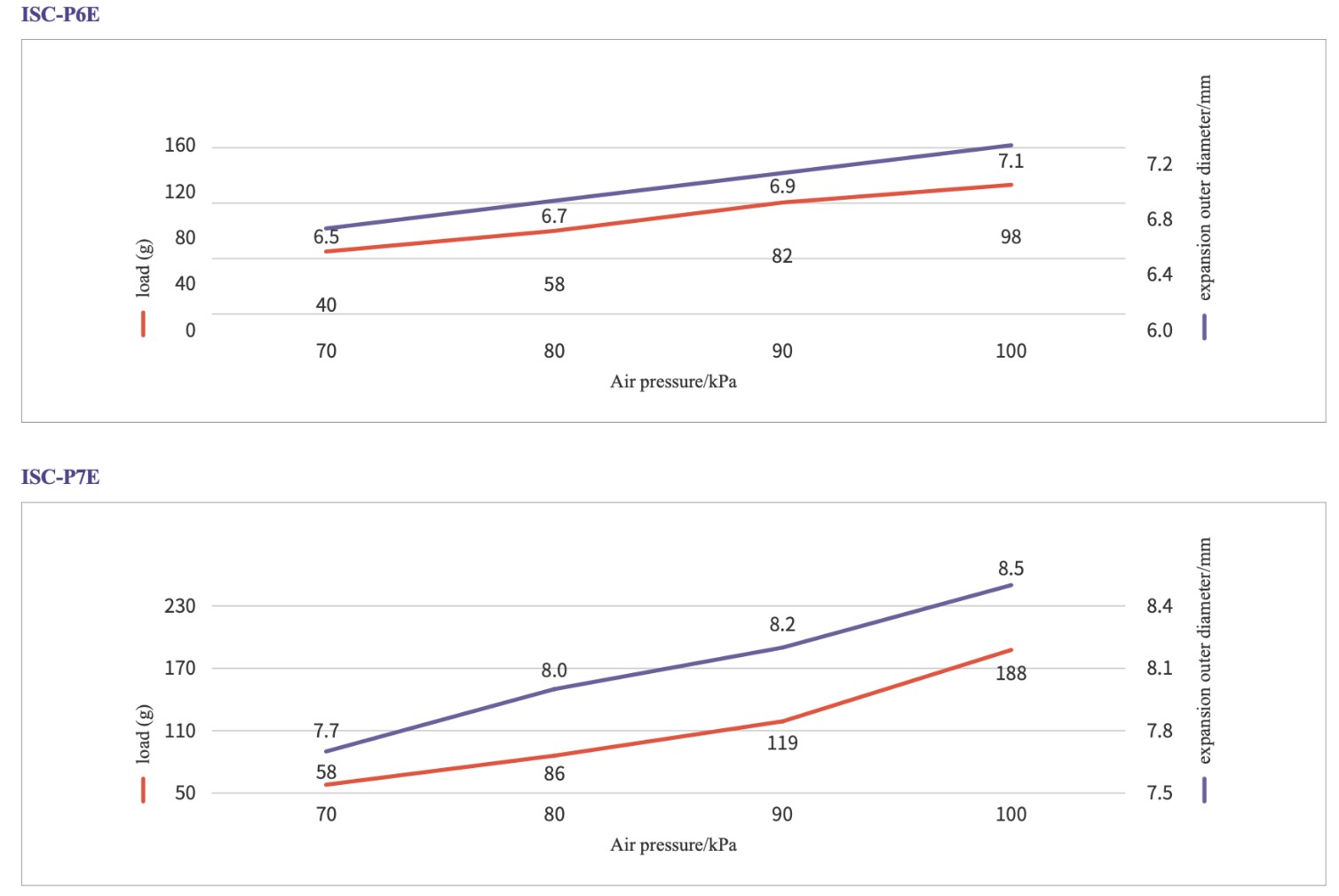
Đường kính ngoài mở rộng
| Người mẫu | Phạm vi áp suất hoạt động /kPa | Đường kính ngoài tối đa khi giãn nở/mm | Tải trọng tối đa/g | Trọng lượng/g của thiết bị | Mô hình thanh kim loại | Kích thước lỗ lắp đặt/mm |
| ISC-SC6-P4.5E | 0-120 | 5.2 | 70 | 36 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P5E | 0-120 | 6.1 | 110 | 36 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P6E | 0-100 | 7.1 | 98 | 36 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P7E | 0-100 | 8,5 | 188 | 36 | VFNT 1421-G18 | 14,5 |
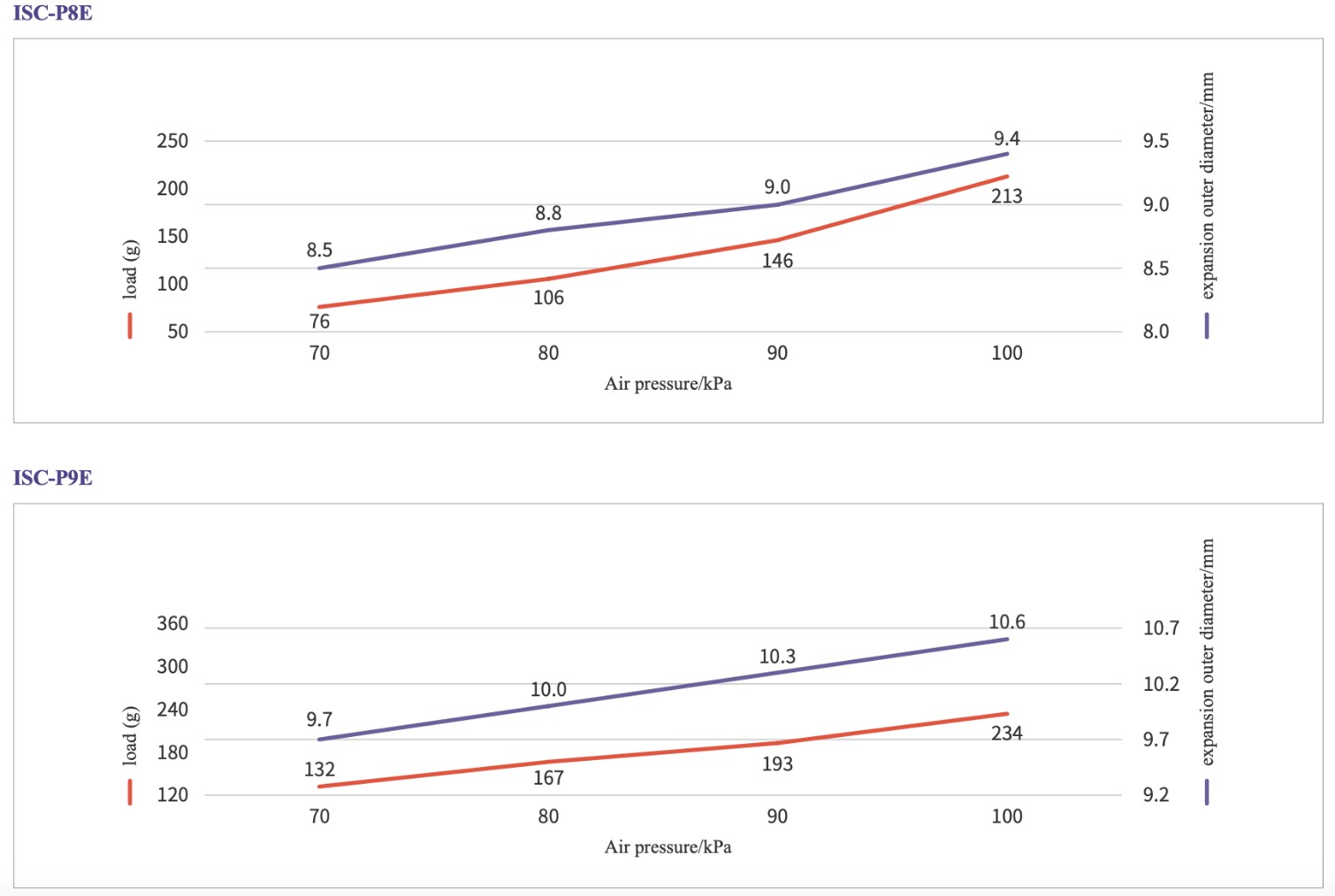
| ISC-SC6-P8E | 0-100 | 9.4 | 213 | 36 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P9E | 0-100 | 10.6 | 234 | 37 | VFNT 1421-G18 | 14,5 |
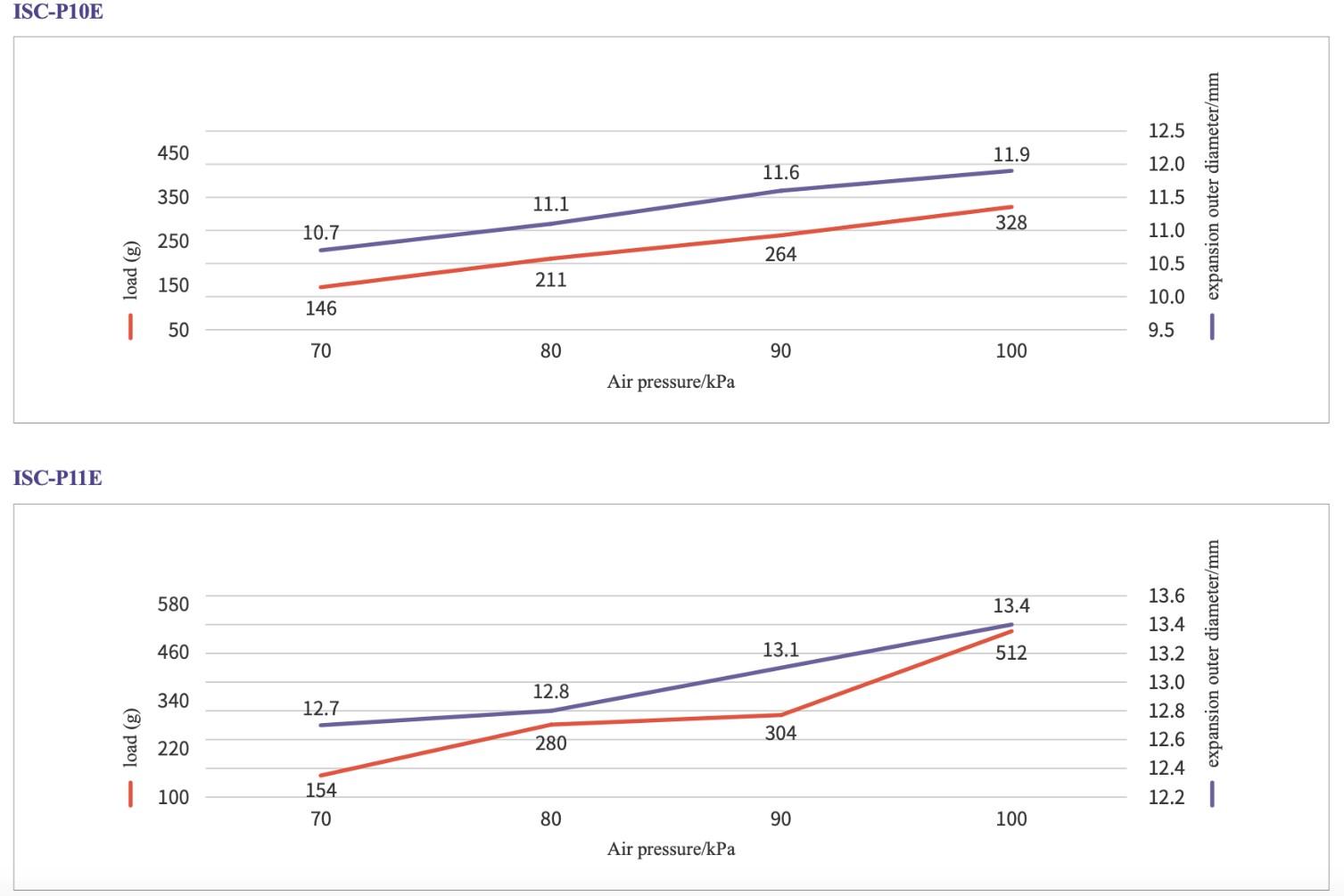
| ISC-SC6-P10E | 0-100 | 11,9 | 328 | 37 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P11E | 0-100 | 13.4 | 512 | 38 | VFNT 1421-G18 | 14,5 |
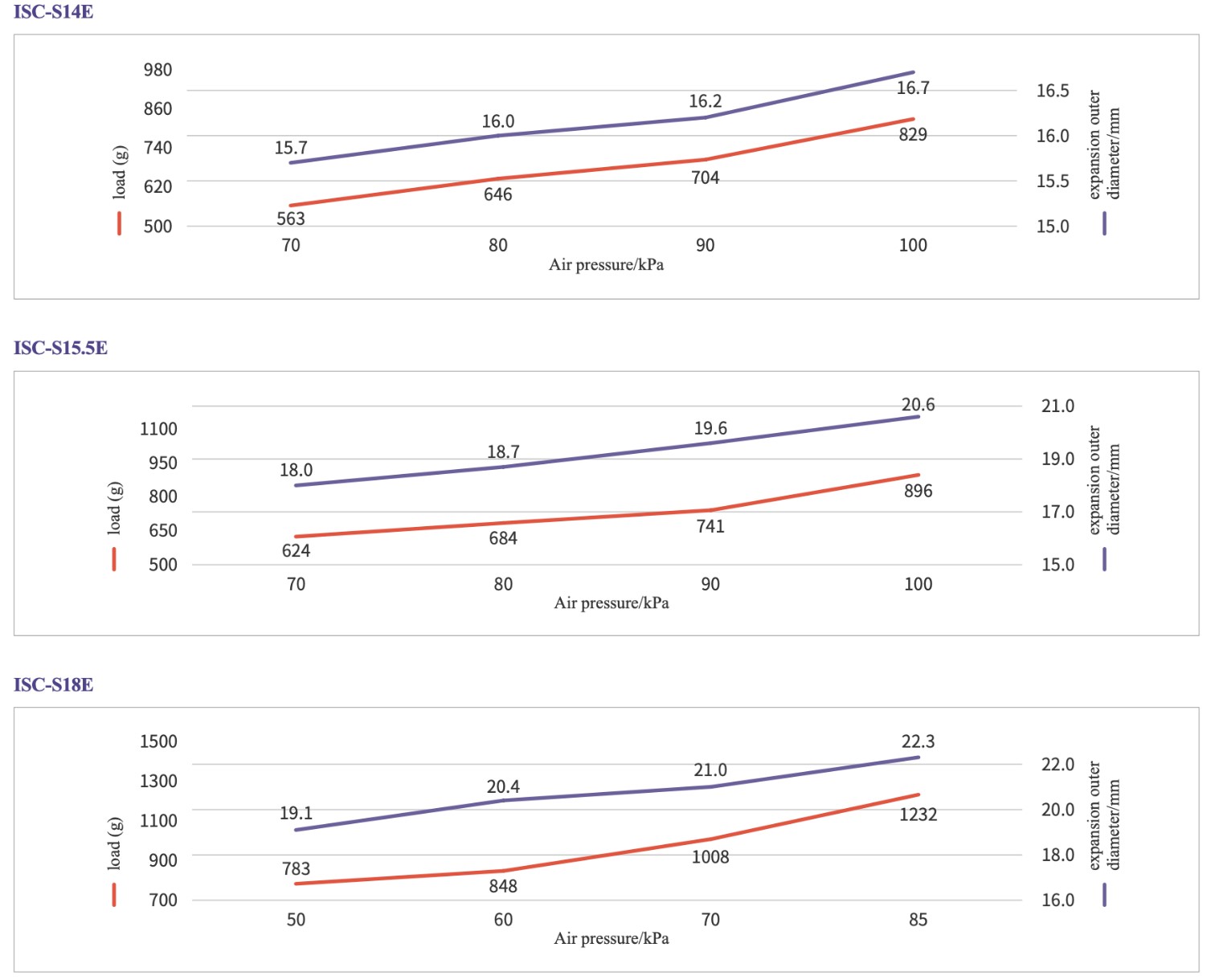
| ISC-SC6-S14E | 0-100 | 16.7 | 829 | 42 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-S15.5E | 0-100 | 20,6 | 896 | 42 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-S18E | 0-85 | 22.3 | 1232 | 47 | VFNT 1421-G18 | 14,5 |
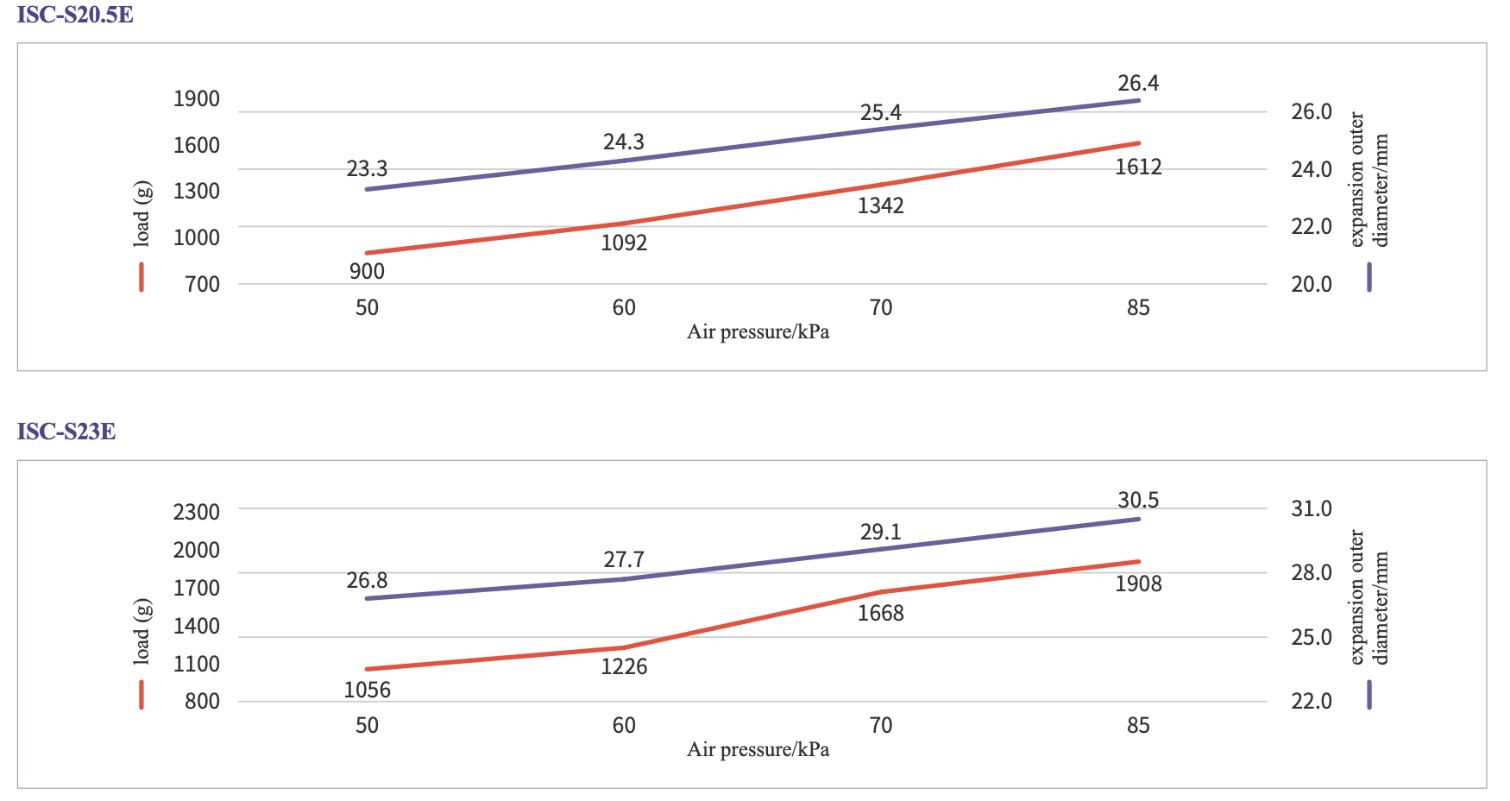
| ISC-SC6-S20.5E | 0-85 | 26.4 | 1612 | 49 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-S23E | 0-85 | 30,5 | 1908 | 51 | VFNT 1421-G18 | 14,5 |
* Đối tượng thử tải tối đa của dòng P là đường kính ngoài của mô hình +0,3mm; Đối tượng thử tải tối đa của dòng S là đường kính ngoài của mô hình +1mm; Việc thử tải được thực hiện bằng các thiết bị chuyên nghiệp.
Doanh nghiệp của chúng tôi


Danh mục sản phẩm
-

Bộ kẹp điện servo DH ROBOTICS dòng RGD –...
-

DÒNG MÁY KẸP ĐIỆN HITBOT – Z-EFG-13...
-

DÒNG SẢN PHẨM THAY THẾ NHANH – QCA-200-D1 Một sản phẩm thay thế nhanh...
-

DÒNG SẢN PHẨM THAY ĐỔI NHANH – QC-200 Tròn Điều Chỉnh Bằng Tay...
-

DÒNG SẢN PHẨM THAY THẾ NHANH – QCA-S100 A Quick C...
-

DÒNG SẢN PHẨM THAY THẾ NHANH – QCA-S500 A Quick C...