Dòng sản phẩm kẹp điện HITBOT – Kẹp điện ba ngón Z-ECG-10




Danh mục chính
Cánh tay robot công nghiệp / Cánh tay robot cộng tác / Kẹp điện / Bộ truyền động thông minh / Giải pháp tự động hóa
Ứng dụng

Tính năng

·Chức năng phát hiện rơi kẹp, chức năng xuất diện tích
·Có thể điều khiển lực, vị trí, tốc độ, điều khiển chính xác thông qua Modbus.
·Kẹp trung tâm ba ngón tay
·Bộ điều khiển tích hợp: kích thước nhỏ gọn, dễ dàng tích hợp.
·Chế độ điều khiển: 485 (Modbus RTU), I/O
Kẹp điện ba ngón tay, dễ dàng kẹp các vật thể hình trụ.
Hiệu suất cao
Lực kẹp: 3-10N,
Mật độ năng lượng cao
Độ chính xác để kiểm soát
Nó có thể được điều khiển bằng Modbus.
Phản hồi thông minh
Nó có chức năng phát hiện giọt kẹp và xuất tín hiệu theo vùng.
Bộ điều khiển tích hợp
Kích thước nhỏ gọn, dễ dàng tích hợp.
Chế độ điều khiển đa dạng
Hỗ trợ I/O 485 (Modbus)
Kẹp ba ngón tay
Thiết kế kẹp ba ngón tay, phù hợp với nhiều dịp khác nhau.




Thông số kỹ thuật
| Mã số sản phẩm: Z-ECG-10 | Thông số |
| Tổng cộng đột quỵ | 10mm |
| Lực nắm | 3-10N |
| Khả năng lặp lại | ±0,03mm |
| Trọng lượng cầm nắm được khuyến nghị | Tối đa 0,2kg |
| Quá trình lây truyền cách thức | Thanh răng và bánh răng + Ray dẫn hướng bi |
| Bổ sung mỡ bôi trơn cho các bộ phận chuyển động | Cứ sau sáu tháng hoặc 1 triệu chuyển động/lần |
| Thời gian chuyển động một chiều | 0,3 giây |
| Phạm vi nhiệt độ hoạt động | 5-55℃ |
| Phạm vi độ ẩm hoạt động | RH35-80(Không có sương giá() |
| Blacklash | Một mặt: 0,2mm |
| Kiểm soát đột quỵ | Có thể điều chỉnh |
| Điều chỉnh lực kẹp | Có thể điều chỉnh |
| Cân nặng | 0,5kg |
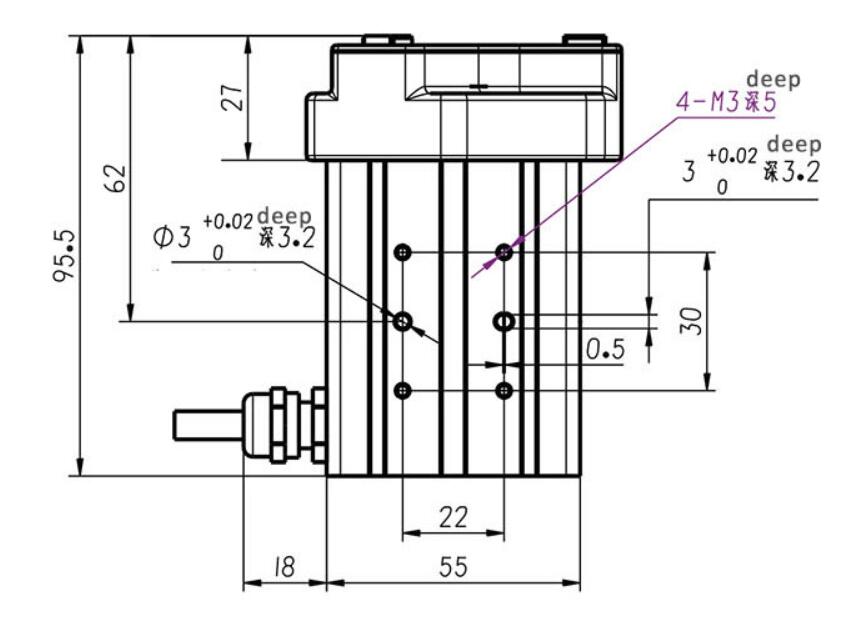
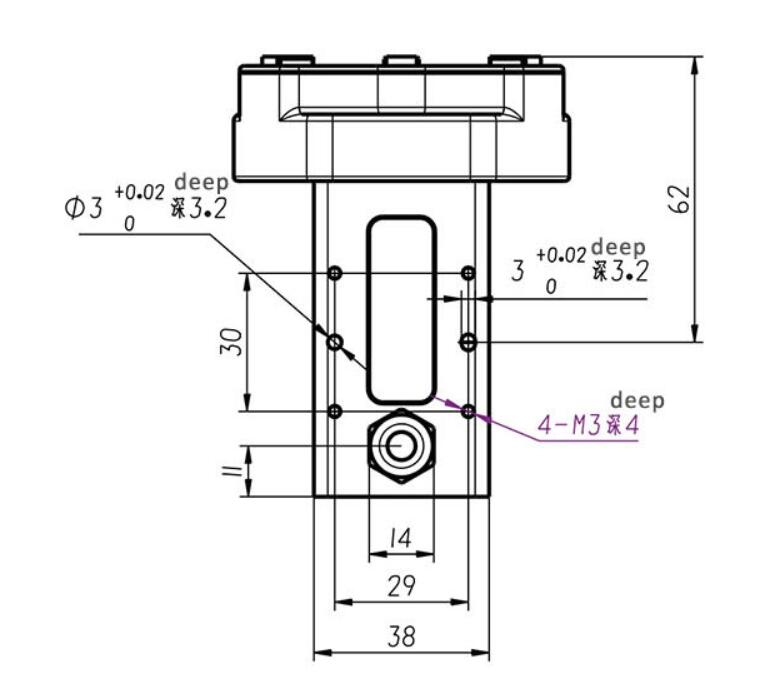
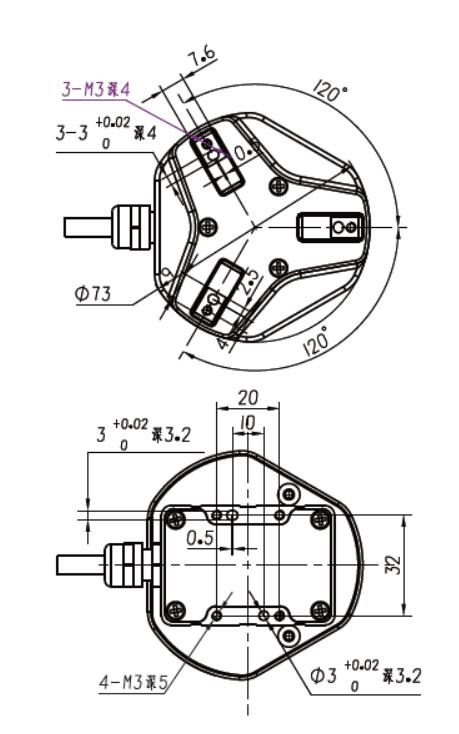
| Kích thước(Dài*Rộng*Cao() | 73*73*95,5mm |
| Cấp độ bảo vệ | IP20 |
| Loại động cơ | Động cơ điện servo |
| Dòng điện cực đại | 0,6A |
| Điện áp định mức | 24V ±10% |
| Dòng điện chờ | 0,3A |
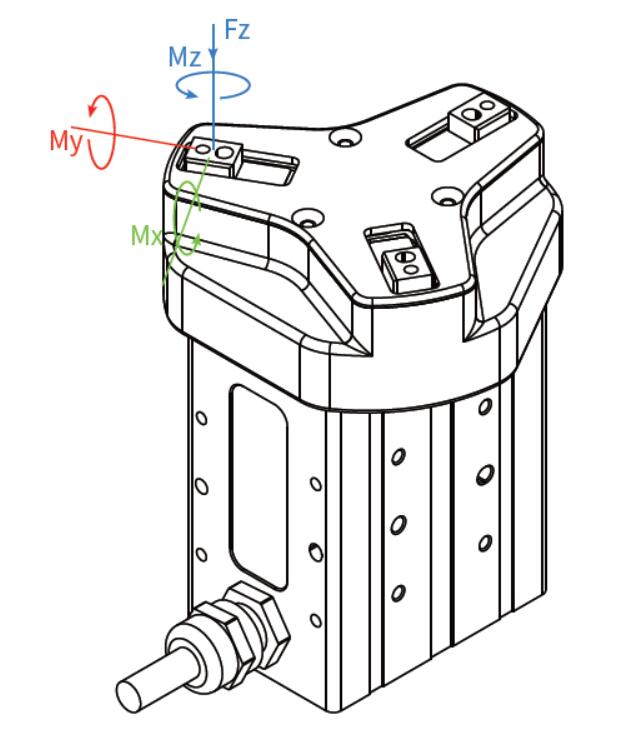
| Tải trọng tĩnh cho phép theo phương thẳng đứng | |
| Fz: | 70N |
| Mômen xoắn cho phép | |
| Mx: | 0,64 Nm |
| Của tôi: | 0,4 Nm |
| Mz: | 0,48 Nm |
Độ chính xác khi định vị, kẹp ba ngón tay
Máy kẹp điện ba ngón Z-ECG-10 có độ lặp lại ±0.03mm, kẹp bằng ba ngón, tích hợp chức năng phát hiện rơi khi kẹp, xuất tín hiệu theo vùng, giúp kẹp vật thể hình trụ tốt hơn.


Bộ điều khiển tích hợp sẵn, khả năng tích hợp cao.
Khả năng bảo vệ tuyệt vời chống quá tải tức thời, đảm bảo bộ kẹp điện không bị dừng hệ thống hoặc gặp các tình huống bất thường khác. Bộ điều khiển được tích hợp sẵn, cho phép điều khiển lực, mũi khoan và tốc độ, chiếm ít không gian làm việc, dễ dàng tích hợp.
Kích thước nhỏ gọn, dễ dàng lắp đặt.

Z-ECG-10 sử dụng cơ cấu truyền động bánh răng và thanh răng + ray dẫn hướng tuyến tính, kích thước L73*W73*H109, trọng lượng chỉ 0,65kg, cấu trúc nhỏ gọn, hỗ trợ nhiều kiểu lắp đặt, dễ dàng hoàn thành nhiều nhiệm vụ kẹp.


Phản ứng nhanh, kiểm soát lực chính xác
Hành trình ngắn nhất là 0,3 giây, lực kẹp từ 3-10N, hành trình kẹp 10mm, trọng lượng khoảng 0,2kg, cho phép kẹp với độ chính xác cao.
Nhiều chế độ điều khiển, dễ sử dụng.

Z-ECG-10 có thể được điều khiển chính xác bằng Modbus, dễ dàng phân bổ, sử dụng giao tiếp I/O kỹ thuật số, chỉ cần một dây cáp để kết nối BẬT/TẮT, nó cũng tương thích với hệ thống điều khiển PLC chính.

Độ lệch tâm tải
Doanh nghiệp của chúng tôi







